出典
- Ars Technica AI
カタログ
実際に見てみる
こうした作品の裏側にあるモデルやスタイルをチェック。無料アカウントで、ギャラリーをすぐに楽しめます。
こうした作品の裏側にあるモデルやスタイルをチェック。無料アカウントで、ギャラリーをすぐに楽しめます。
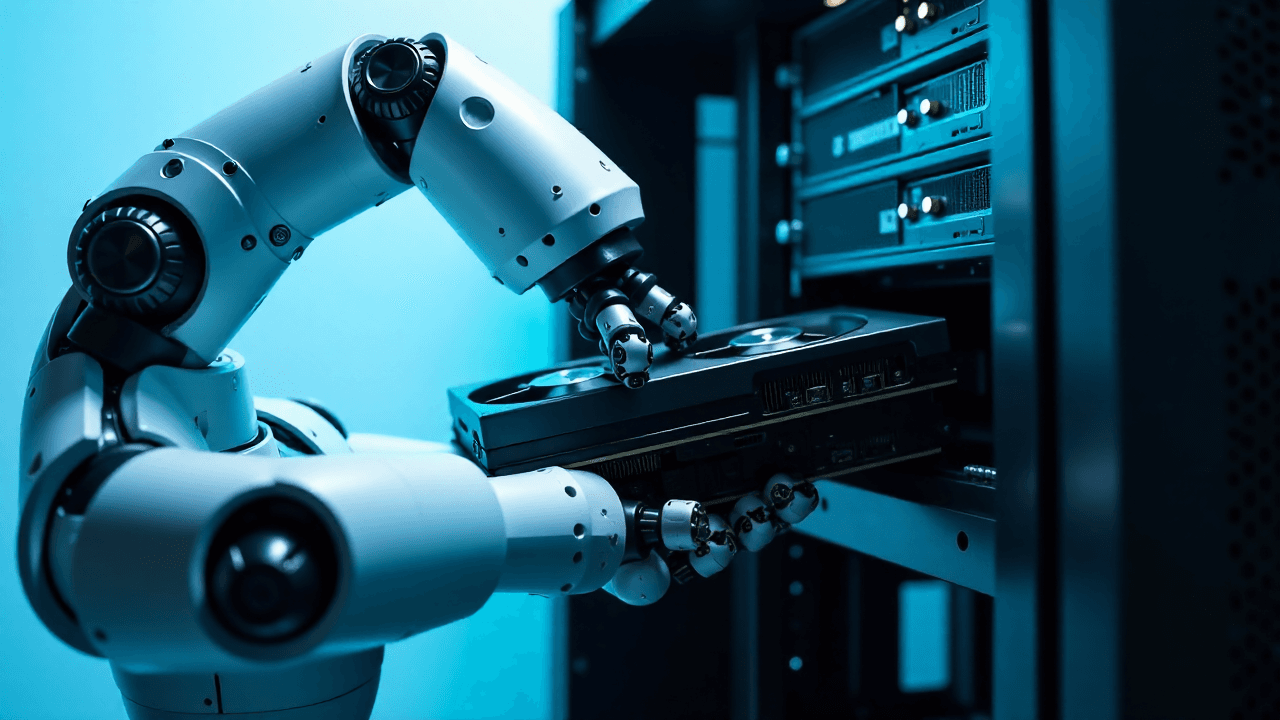
Nvidiaは、AIコーディングエージェントのチームを展開し、ロボットのトレーニングを自律的に指揮している。GPUの取り付けやケーブルタイの切断など、物理的なハードウェア作業を、人間がステップごとにプログラミングすることなくマシンに習得させる。
Ars Technicaが報じたこのシステムは、単一のAIモデルが命令を発するものではない。問題の異なる部分をそれぞれ担当するコーディングエージェントの協調チームが、ロボットアームのトレーニングに使用するプログラムを共同で作成・反復する仕組みだ。あるエージェントが把持動作の候補コードを生成し、別のエージェントがロボットの成否を評価し、さらに別のエージェントが失敗データをもとにルーティンを書き直す。ロボットがパフォーマンスの閾値をクリアするまで、このループが続く。
このアーキテクチャが重要なのは、ロボティクスにおける最難関の問題の一つ、すなわち新しいタスクごとに人間の専門家がトレーニングシナリオを手作業で作成しなければならないという問題を回避できるからだ。コーディングエージェントが反復作業を担うことで、Nvidiaは人間のエンジニアリングチームを比例的に拡大することなく、タスクの数と種類をスケールアップできる。
デモンストレーションタスクとしてGPUの取り付けを選んだのは意図的だ。グラフィックカードを正しく装着するには、周囲のコンポーネントを傷つけないよう注意しながら、長いコネクタ全体に均一な力を加える必要がある。これは力の調整と空間的な精度の両方を要求するタスクだ。ケーブルタイの切断はまた別の課題をもたらす。ロボットは小さく柔軟なターゲットを見つけ出し、滑らずに切断するのに十分な力だけを加えなければならない。どちらのタスクも制御された実験室の抽象的な作業ではなく、実際のデータセンターのメンテナンス業務に直結している。そこにこそ、Nvidiaの商業的な関心が明らかに向いている。
AI画像・動画生成を扱うクリエイターにとって、この下流への影響はインフラ面に及ぶ。Charmloopの生成モデルをはじめ、GPUに依存するあらゆるAIサービスを動かしているデータセンターこそ、Nvidiaがこの自動化で狙っている施設だ。GPUハードウェアを大規模かつ確実に取り付け・保守できるロボットは、コンピューティング容量拡大における労働力のボトルネックを解消する可能性がある。これは現在、プロバイダーが生成スループットを追加しコストを削減するスピードを制約する主要因の一つだ。
ここに見られるより広いパターンは注目に値する。ソフトウェア開発のワークフローを再形成してきたAIコーディングエージェントというカテゴリのツールが、今やAIが動作する物理システムという一段下のレイヤーに適用されている。Nvidiaは本質的に、AIを使ってより優れたAIインフラを構築しているのだ。
これは、AIアートのクリエイターたちが自身の画像生成パイプラインの自動化に試みてきたオープンソースのコーディングモデルとは異なるユースケースだ。しかし根底にある論理は同じである。反復的でコードの多い、人間が退屈でエラーを起こしやすいと感じる作業をエージェントに任せるということだ。Nvidiaの場合、「出力」はカスタムのComfyUIワークフローではなくトレーニング済みのロボットだが、エージェント主導の反復ループは構造的に同一だ。
Nvidiaのスタック上に構築されたツールを使用するクリエイター、つまり主要な画像生成プラットフォームのほぼすべてのユーザーは、直接関わるかどうかにかかわらず、この研究の恩恵を受ける立場にある。このシステムが大規模に機能すれば、ハードウェア展開サイクルの高速化につながり、ひいてはプロバイダーが次世代モデルを展開し、GPU供給不足による遅延なしに容量を拡大するスピードに影響を与える。
Nvidiaはこのシステムの商用リリーススケジュールを発表していない。現時点で公開されているのは研究デモンストレーションのみだ。しかし、特に自社のハードウェアエコシステムに関わるあらゆる分野において、研究から本番環境へ迅速に移行してきた同社の実績を考えると、これは遠い将来の実験というよりもロードマップ上の項目に近いと言えるだろう。2027年のAI生成品質を形作るコンピューティングインフラの意思決定は、今まさに行われている。

